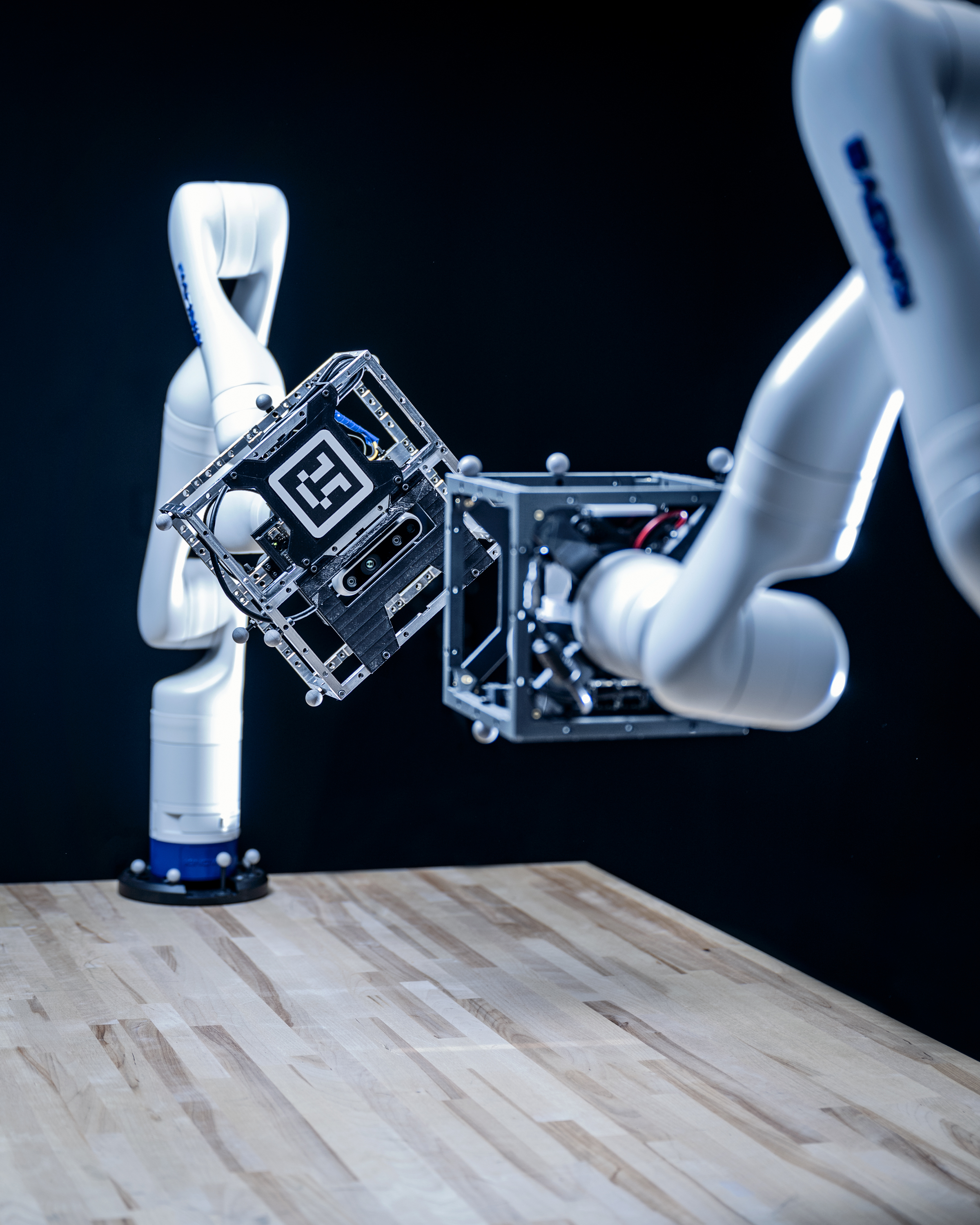
ISAM, RPO, and SM&L mission operations all involve close-proximity (1-10 meter) satellite maneuvers, which require high precision and autonomous control because no one wants to break satellites and ground control suffers
from telemetry delays.
In the space industry, there is currently a large market to apply AI, ML, RL, Computer Vision, and other modern software technologies to these problems. However, the industry is slow to adopt them due to their potentially unpredictable behavior.
My work in the CAVE Lab has furthered almost every aspect of our ability to test these software and hardware tools on the ground before sending them into space, which has a plethora of benefits for companies and researchers hoping to fly vehicles in the aforementioned mission areas.